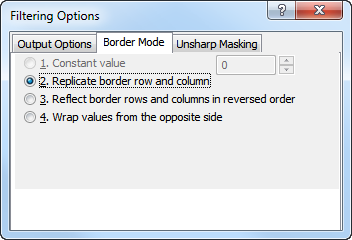
A kernel filter does not directly apply to the borders of the images; when the center of the kernel is placed on a border pixel some part of the coefficients of the kernel will be located outside of the data set. For performing a filter convolution at the borders and avoiding unwanted border effects different strategies can be applied. The difference between the strategies becomes most apparent for larger filter kernels. The simplest strategy is to ignore the border regions and just filter those pixels located so the filter kernel doesn't overlap the image borders. All other strategies are in principle based on an enlargement of the image. The different modes can be defined in the Settings menu seen below:
The following border mode currently exists:
The values outside the border are replaced by a user defined constant value. An appropriate value will often be the mean value of the image. Plane corrected images are leveled so that the mean value equals zero.
Here the data found in the (first or last) row or column is duplicated to the enlarged temporary data.
- The pixels are "mirrored" at the borders.
- The data found at the opposite border of the image is used to fill the enlarged data and make it continuous.