Select one of the four available methods according to the guidelines below. If one of the Threshold methods can be used this is recommended as the Watershed methods are more computationally intensive.
This, the simplest and fastest of the four methods is used for detection of Particles or Pores on images where there background surface is flat and level and has a roughness considerably smaller than the height of the Particles (or depth of the Pores). Often this implies that the variation in height of the Particles (depth for Pores) is small. Both manual and automatic detection modes are available. Using the analogy of water flooding a landscape, Particles are the islands left when the landscape is flooded to the threshold level; Pores is all below the water surface.
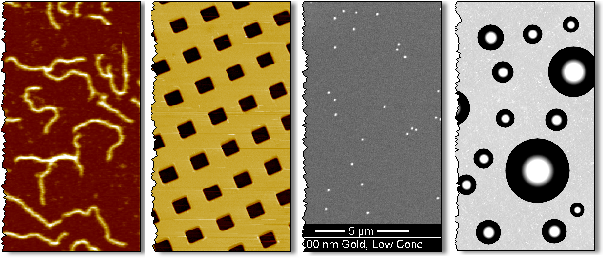
Examples of typical images for which the Threshold Detection Method is used.
Courtesy of Dr. Kai Dirsherl, Danish Fundamental Metrology
This method is used for the same type of images as for the standard Threshold method but can detect both Particles and Pores simultaneously using two separate threshold levels. Further, Advanced Threshold is used when Particles or Pores agglomerate on the surface since it can split adjoining Particles (or Pores) at the local minima (or maxima, respectively) where they touch. Further, especially targeted towards robust automatic image processing (using Batch Processing) and quality control, the Advanced Threshold method offers a number of adaptive modes for setting threshold levels.
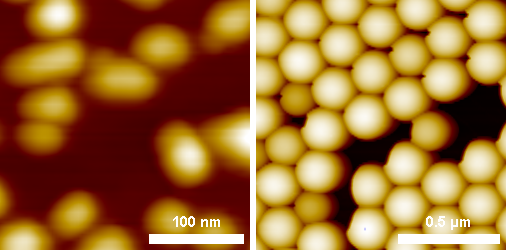
Examples of typical images for which the Threshold Detection Method will typically be used.
Right image courtesy of Danish Fundamental Metrology.
This method is primarily used for detecting dispersed Particles or/and Pores on a background which is too wavy for the Threshold methods or when the distribution of heights/depths is too wide. It can also be used for detecting connected Particles or Pores when Advanced Threshold is un-successful in splitting them. This method is also effective for detecting grain boundaries of e.g. polished metal or ceramic surfaces. This method works like its Packed Features version, except that it runs on the slope image, i.e. an image of the local maximum slope, which allows Particles, Pores and the area between them (Plateaus) to be detected separately and simultaneously.
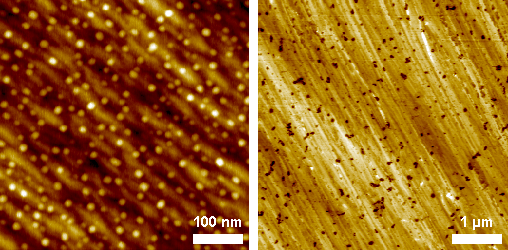
Examples of typical images for which the Watershed – Dispersed Features Detection Method will typically be used.
Use this method when the image is fully covered by adjoining features of the same type, i.e. Pores or Particles, with no spacing in between; as for example the grain structure of a rough surface. Watershed segmentation works after the following principle: Using the analogy of water flooding a landscape, water coming as rain water will drain into the bottom of all valleys. Hence, every valley is associated with a catchment area, from where all rain will run into the same drain. Shapes are generated from these catchment areas (or basins). All features are by definition Pores. In Particle mode the image is inversed behind the scenes.
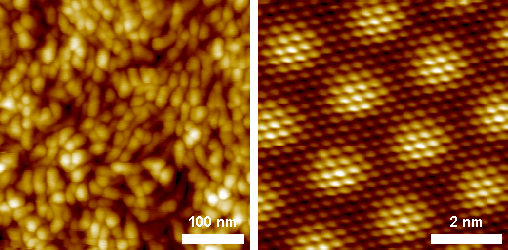
Examples of typical images for which the Watershed – Packed Features Detection Method will typically be used.
Courtesy of Danish Fundamental Metrology (left image), University of Interdisciplinary Nano Science Center (iNANO) and Institute of Physics and Astronomy, University of Aarhus (right image).
Circle Detection is designed for detecting round/spherical particles in an image, which are difficult to detect or separate using the Threshold or Watershed methods, for example if the particles are touching or overlapping or simply have a weak contrast. The circle detection method should be used for relatively narrow distributions of particle sizes, as it is computational rather intensive, and computation load increase with the range of circle diameters searched for.
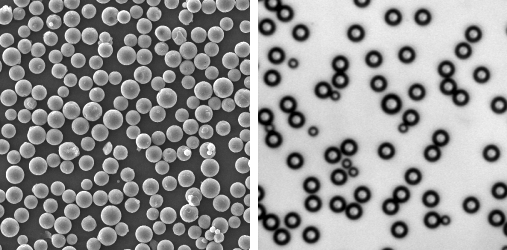
Example of typical images where Circle Detection is advantageous to use