In this chapter all parameters – or measurands - calculated for the “Measure Shapes” are described. The calculated parameters are the same for manually drawn Measure Shapes by Measure Shape tools (Type = User defined) and for Shapes generated by the Particle & Pore Analysis module.
For the Line Measure Shape which covers no area all area and volume parameters are naturally not calculated. For the Ellipse/Circle Measure Shape parameters are calculated from analytical geometrical formulae when possible. Ellipse/Circle Measure Shapes are described by their major and minor axes. For the Polygon Measure Shapes parameters are calculated from their contour points and from the enclosed image points (pixels).
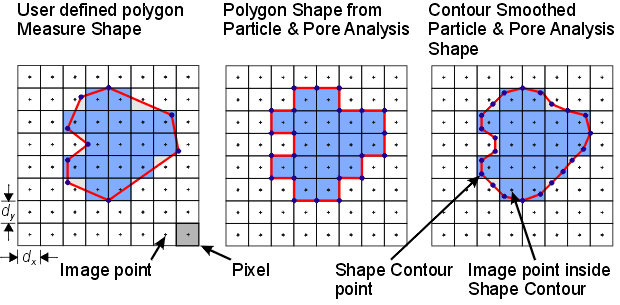
The picture shows the difference between “handmade”, i.e. User defined, Polygon Measure Shapes and Polygon Shapes generated by the Particle & Pore Analysis module: Handmade Measure Shapes have Contour points where the user has clicked in the image (typically few), Particle & Pore Analysis Shapes have Contour points at all pixel corners of the feature boundary. Note that the effect of Contour Smoothing is a shorter perimeter (contour length), but also a slight shrinkage of the Shape.
ID
All Measure Shapes have an ID number. The lowest ID number is 1, the highest number is equal to the number of Shapes.
Area
The Area is calculated from the shapes contour (periphery), i.e. the closed polygon that surrounds the feature. The area is calculated using:


Where a and b are the major and minor axes of the ellipse.
If the Shape has interior holes, which may be the case for Shapes generated by the Particle & Pore Analysis module, the area of these are calculated in the same way and subtracted from the area calculated from the surrounding contour.
I addition to the area defined by the contour, SPIP™ can also calculate the 3D area of the surface. This only makes sense for topographic images, i.e. where all three axes are in units of length. An analogy to Surface Area compared to just Area is the number of meters a person will traverse walking in a straight path from A to B over hill compared to if the hill was not there at all. This parameter is equivalent to the S3A parameter for roughness analysis.
The diameter (or Heywood diameter) is expressed as the diameter of a circle having an area equal to the area enclosed by the Shape’s contour (perimeter). This area is different from the reported Area parameter if the Shape contains holes.

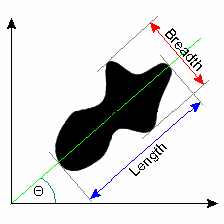
Length is defined as the longest cord along the angle Q given by the moment's axis to the x-axis. In other words, if we rotated the shape so that the moment's axis becomes parallel to the x-axis, then Length is the extension of the bounding rectangle in the horizontal direction.
For lines this is the distance between the most distant points of the line.
For circles this equals the diameter
For ellipses it equals the length of the major axis, a.
Breadth (or width) is defined as the longest cord perpendicular to the angle Q given by the moments axis to the x-axis. In other words, if the Shape was rotated so that the moment's axis becomes parallel to the x-axis, then Breadth is the extension of the bounding rectangle in the vertical direction. For ellipses it equals the length of the minor axis, b.
Average Breadth
In addition to reporting the overall caliper of the Shape perpendicular its moment, the Breath, the average of the local breadth is also reported. The local breadth is the Shape’s extension perpendicular to its moment at any point along its axis.
Std. Dev. Breadth
The Standard Deviation Breadth is the standard deviation of local breadths.
Maximum Breadth
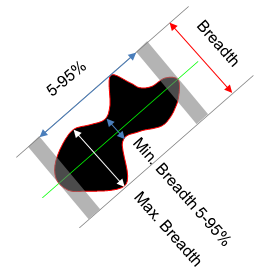
Maximum Breath is the maximum of local breadth. The is number will usually be smaller than the overall Breadth of the Shape.
Min. Breadth 5-95%
Minimum Breadth 5-95% is the minimum local breadth found along the Shape’s length axis. The first 5% and last 5% along the length of the Shape are ignored. The reason is that most Shapes will narrow in at either end resulting in a minimum local breadth close to zero at the end. In most cases this is not the value looked for. Therefore ends are ignored. This may in rare cases surprisingly result in a value smaller than the Average Breadth (short Shapes).
Radius is defined as half the size of that of the (Heywood) Diameter described above.
For Polygon Shapes the Perimeter is calculated from the Shape's contour as:


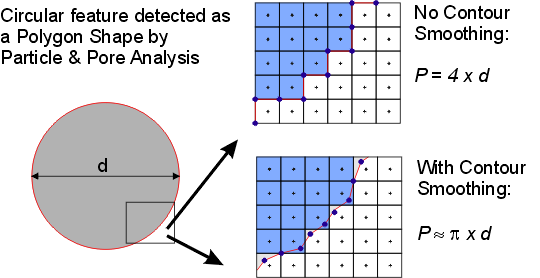
Example of the effect of Contour Smoothing: If a circular feature is detected by the Particle & Pore Analysis module, the perimeter of the generated polygon Shape will by the same as a square with the same side lengths as the diameter of the circle! Smoothing the Contour will bring the calculated Perimeter, P, closer to the expected result, namely p·d.
For ellipsoidal Shapes with major and minor axes a and b, respectively, the perimeter is calculated from using the following formulae (Ramanujan 1914):

Maximum Caliber (also known as the maximum Feret's diameter) is the longest distance between any two points on the Shape's contour.
X Extend is the size of the Shape along the x axis.
Y Extend is the size of the Shape along the y axis.
The Fiber is the longest path in the Skeleton (see below). The Fiber Length is the length of the Fiber. For measuring the length of long thin Shapes (e.g. DNA), Fiber Length is the relevant parameter.
Note, that this parameter may increase the computation time considerably when selected.
It is possible from any polygon measurement shape to calculate the fiber and a cross section profile along the fiber, this is shown in description of the Polyline Menu.
The skeleton of a polygon Shape is the result of thinning the Shape into a one pixel wide branched line. The Skeleton Length is the sum of the length of all branches (or segments) of the Skeleton.
Ellipse Shapes are not skeletonized.
Note, that this parameter may increase the computation time considerably when selected.
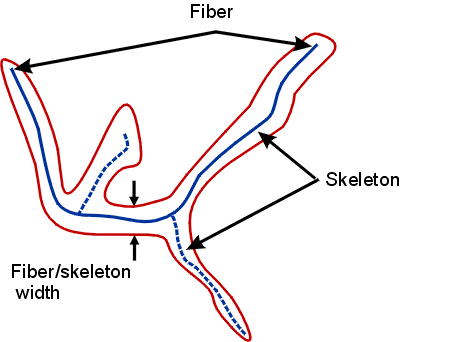
Fiber Width, or more accurately skeleton width is the Area of the Shape divided by the Skeleton Length. For a reasonable well behaved worm-like Shape the Fiber Width will be the mean width perpendicular to its fiber.
Note, that this parameter may increase the computation time considerably when selected.
The following parameters are calculated from the raw Z (height) values, which corresponds to a reference value of zero. This is in contrast to the "Relative to Mean Contour Height" parameters which have the mean contour height of the individual shapes as reference.
In case an image is flat with particles or pores sticking out and in case the flat part has been offset to zero, then the two variants of height and volume parameters will give almost the same. With the Threshold methods it is in most cases advisable to use the Z parameters and making sure to offset the background appropriately. But with the watershed methods, which have their advantage on wavy surfaces it make more sense to use the other variant with the height measured relatively to the mean contour height.
Z Minimum is the minimum Z value of all points inside the Shape Contour.
Z Maximum is the maximum Z value of all points inside the Shape Contour.
Z Range = Z Maximum – Z Minimum
Z Mean is the average of the Z values of all points inside the Shape Contour:

Z Median is the median of the Z values of all points inside the Shape Contour, i.e. the Z value above (or below) which 50% of the points inside the Shape are found.
Z Std. Dev. is the standard deviation of the Z values of all points inside the Shape Contour.
Z Volume is the maximum of Z Material Volume and Z Void Volume, see below
Z Material Volume is the volume of all pixels inside the Shape's Contour with a Z value greater than or equal to zero:

where dx and dy are the point spacing in the X and Y directions of the image, respectively.
Z Void Volume is the volume of all pixels inside the Shape's Contour with a Z value lower than or equal to zero:

where dx and dy are the point spacing in the X and Y directions of the image, respectively.
ZNet Volume = ZMaterial Volume – ZVoid Volume
Minimum Contour Height is the minimum Z value (relative to Z=0) of the Shape's contour points. The local Z values are calculated using bi-linear interpolation at each Contour point. In the case of User defined Shapes (manually drawn) and Ellipse/Circle Shapes the Contour is sampled at less than Ö2 pixel spacings by adding temporary Contour points.
Maximum Contour Height is the maximum Z value (relative to Z=0) of the Shape's contour points. The local Z values are calculated using bi-linear interpolation at each Contour point. In the case of User defined Shapes (manually drawn) and Ellipse/Circle Shapes the Contour is sampled at less than Ö2 pixel spacings by adding temporary Contour points.
Mean Contour Height is the average Z value (relative to Z=0) of the Shape's contour points. The local Z values are calculated using bi-linear interpolation at each Contour point. In the case of User defined Shapes (manually drawn) and Ellipse/Circle Shapes the Contour is sampled at less than Ö2 pixel spacings by adding temporary Contour points.
All these parameters are Z values relative to the Mean Contour Height, ZMCH. All “height” parameters are for Z values higher than or equal to the Mean Contour Height. All “Depth” parameters are for Z values lower than or equal to the Mean Contour Height. In the following we use the following abbreviation:
ZMCH = Mean Contour Height

Mean Height is the average of Z values (relative to the Mean Contour Height) of all points inside the Shape having Z ³ ZMCH.

Standard Deviation of Height is the standard deviation of Z values (relative to the Mean Contour Height) of all points inside the Shape having
Z >= ZMCH
Median Height is the median of Z-ZMCH of all points inside the Shape Contour with
Z ³ ZMCH.

Mean Depth is the average of Z values (relative to the Mean Contour Height) of all points inside the Shape having Z £ ZMCH.

Standard Deviation of Depth is the standard deviation of Z values (relative to the Mean Contour Height) of all points inside the Shape having Z £ ZMCH.
Median Depth is the median of ZMCH –Z of all points inside the Shape Contour with Z £ ZMCH.
Volume is the maximum of the found Material Volume and Void Volumes:
Volume = Max{Material Volume, Void Volume}
The Material Volume equals the volume of all points having a Z value higher than the Mean Contour Height:

The Void Volume equals the volume of all points having a Z value lower than the Mean Contour Height. This value will always be positive:

The Net Volume is calculated as
Net Volume = Material Volume - Net Volume
The Geometric Center of a polygon Shape is based on the Shape's Contour. Here, center of gravity is calculated using:



For ellipses/circles it is simply the center given by half the major and minor axis offset by X Min and Y Min.
Center of Gravity Material is the center of gravity for those points inside the Shape with Z values above the Mean Contour Height, i.e. of the Material Volume. Only points inside the Shape where Z > Mean Contour Height are used. This is the Center of Gravity relevant for Particles.


The Center of Gravity, Void, is the center of gravity for those points inside the Shape with Z values below the Mean Contour Height, i.e. of the Void Volume. Only points inside the Shape where Z < Mean Contour Height are used. This is the Center of Gravity relevant for Pores.


X Min is the lowest X coordinate of the Shape's Contour points and X Max is the highest.
Y Min is the lowest Y coordinate of the Shape's Contour points and Y Max is the highest.
X Position, Z Max and X Position Z Max, are the (x, y) coordinates of the point inside the Shape with the highest Z value.
X Position, Z Min and X Position Z Min, are the (x,y) coordinates of the point inside the Shape with the lowest Z value.
Aspect Ratio is defined as the ratio of Length over Breadth. The Aspect Ratio will from this definition always be greater than or equal to 1.0. The Aspect Ratio of both a circle and square is 1.0.

Roundness describes the Shape's resemblance to a circle. The Roundness factor of a Shape will approach 1.0 the closer the Shape resembles a circle. The Roundness factor of a square is 2/π ≈ 0.636.

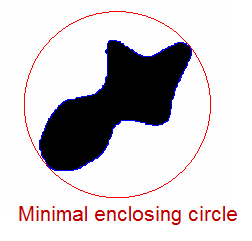
Where Maximum Diameter is the diameter of the minimal enclosing circle, i.e. the smallest circle enclosing all points of the Shape, and Diameter is the diameter of a circle with the same area as the area enclosed by the Shape contour. This area is larger than the reported Area parameter if the Shape contains holes.
NOTE: Calculating the minimal enclosing circle is CPU intensive. Therefore adding the Roundness parameter may increase computation time considerably.
Form Factor provides a measure that describes the Shape of a feature. The form factor is defined by the formula below.

Compactness is a measure expressing how compact a feature is. Except for a circle, which will have a Compactness of 1.0, all Shapes will have a Compactness factor less than 1. The Compactness of a square is (2/π)½ ≈ 0.789.

See comments in the description for Roundness.
Convexity is the ratio between the convex polygons perimeter (shown in green) and the perimeter of the Shape itself.


Elongation is a measure indicating how elongated a Shape is. A square or circle will return the value zero. As these Shapes changes towards a long rectangle or ellipse the returned value converges towards 1.0.

Solidity is a measure describing the resemblance of the Shape's area with it's convex area.

Orientation gives the angle of the axis of momentum. To obtain the Orientation we find the line which best fits all the points in the object, actually only the points describing the Contour are used. This line is the "axis of momentum". Having the moment axis it's simply a matter of calculating the angle to the x-axis.




Neighbor ID is the ID of the Shape which has lowest Geometric Center distance to the actual Shape.
Neighbor Distance is the distance between Geometric Centers of the actual Shape and its Nearest Neighbor
Neighbor Angle is the angle of the line connecting the Geometric Centers of the actual Shape and of its Nearest Neighbor.
Note that the nearest neighbor parameters may increase the computation time considerably when selected.
Manually drawn or manually edited Measure Shapes have Type = User defined. Shapes generated using the Particle & Pore Analysis will have Type = Particle, Pore or Plateau according to the detection settings.



Plateau Index is in combination with the user defined Plateau Range used to classify the detected features in the Watershed – Dispersed Features Detection Method (and in this mode only) in the Particle & Pore Analysis module:
Particles: Plateau Index > Plateau Range
Pores: Plateau Index < -Plateau Range
Plateaus: - Plateau Range £ Plateau Index £ Plateau Range
In many cases Plateau Range is a useful parameter excluding “flat” Shapes using Parameter Filtering.